Next: Spline Curves Up: Interpolation and Curve Fitting Previous: Divided Differences Contents
>> A=[1 1 1 1; 8 4 2 1; 27 9 3 1;125 25 5 1]
>> B=[1.06 1.12 1.34 1.78]'
>> X=uptrbk(A,B)
X =
-0.0200
0.2000
-0.4000
1.2800
>> X'*[27 9 3 1]'
ans = 1.3400
>> X'*A(3,1:4)'
ans = 1.3400
>> X'*[4^3 4^2 4 1]'
ans = 1.6000
>> X'*[(5.5)^3 (5.5)^2 5.5 1]'
ans = 1.8025
 based on
based on
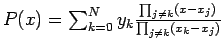
function [C,L]=lagran(X,Y)
%Input - X is a vector that contains a list of abscissas
% - Y is a vector that contains a list of ordinates
%Output - C is a matrix that contains the coefficents of
% the Lagrange interpolatory polynomial
% - L is a matrix that contains the Lagrange coefficient polynomials
w=length(X);
n=w-1;
L=zeros(w,w);
%Form the Lagrange coefficient polynomials
for k=1:n+1
V=1;
for j=1:n+1
if k~=j
V=conv(V,poly(X(j)))/(X(k)-X(j));
end
end
L(k,:)=V;
end
%Determine the coefficients of the Lagrange interpolator polynomial
C=Y*L;
where
>>P=poly(2) >> 1 -2 >>Q=poly(3) >> 1 -3
>>conv(P,Q) >> 1 -5 6 %Thus the product of P(x) and Q(x) is x^2-5x+6
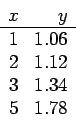
>> X=[1 2 3 5]
>> Y=[1.06 1.12 1.34 1.78]
>> [C,L]=lagran(X,Y)
C = -0.0200 0.2000 -0.4000 1.2800
L =
-0.1250 1.2500 -3.8750 3.7500
0.3333 -3.0000 7.6667 -5.0000
-0.2500 2.0000 -4.2500 2.5000
0.0417 -0.2500 0.4583 -0.2500
>> C*A(3,1:4)'
ans = 1.3400
>> C*[4^3 4^2 4 1]'
ans = 1.6000
>> C*[(5.5)^3 (5.5)^2 5.5 1]'
ans = 1.8025

function [C,D]=newpoly(X,Y)
%Input - X is a vector that contains a list of abscissas
% - Y is a vector that contains a list of ordinates
%Output - C is a vector that contains the coefficients
% of the Newton interpolatory polynomial
% - D is the divided difference table
n=length(X);
D=zeros(n,n);
D(:,1)=Y';
%Use the formula above to form the divided difference table
for j=2:n
for k=j:n
D(k,j)=(D(k,j-1)-D(k-1,j-1))/(X(k)-X(k-j+1));
end
end
%Determine the coefficients of the Newton interpolatory polynomial
C=D(n,n);
for k=(n-1):-1:1
C=conv(C,poly(X(k)));
m=length(C);
C(m)=C(m)+D(k,k);
end
Study this MATLAB code and then use the data set in the first item to
>> X=[1 2 3 5]
>> Y=[1.06 1.12 1.34 1.78]
>> [C,D]=newpoly(X,Y)
C = -0.0200 0.2000 -0.4000 1.2800
D =
1.0600 0 0 0
1.1200 0.0600 0 0
1.3400 0.2200 0.0800 0
1.7800 0.2200 0 -0.0200
>> C*A(4,1:4)'
ans = 1.7800
>> C*[4^3 4^2 4 1]'
ans = 1.6000
>> C*[(5.5)^3 (5.5)^2 5.5 1]'
ans = 1.8025